- 0 replies
- 1,202 views
- Add Reply
- 0 replies
- 1,145 views
- Add Reply
- 0 replies
- 2,537 views
- Add Reply
- 0 replies
- 6,336 views
- Add Reply
- 0 replies
- 1,481 views
- Add Reply
Leica Geosystems unveils Leica TerrainMapper-3

By Lurker,

Leica Geosystems, part of Hexagon, introduces the Leica TerrainMapper-3 airborne LiDAR sensor, featuring new scan pattern configurability to support the widest variety of applications and requirements in a single system.
Building upon Leica Geosystems’ legacy of LiDAR efficiency, the TerrainMapper-3 provides three scan patterns for superior productivity and to customise the sensor’s performance to specific applications. Circle scan patterns enhance 3D modelling of urban areas or steep terr
How Upskilling in GIS Aids Educational Policy Research

By IRES,
How Upskilling in GIS Aids Educational Policy Research
Understanding the distribution of student demographics is crucial for making informed decisions. This is where Geographic Information Systems (GIS) and remote sensing technologies play a vital role. By upskilling in GIS, researchers can harness the power of spatial analysis and mapping to gain valuable insights into student populations and educational disparities.
GIS is a powerful tool that allows researchers to visualize, analyze
The role of ExtSpecR in streamlining UAV-based tree phenomics and spectral analysis

By EmperoR,
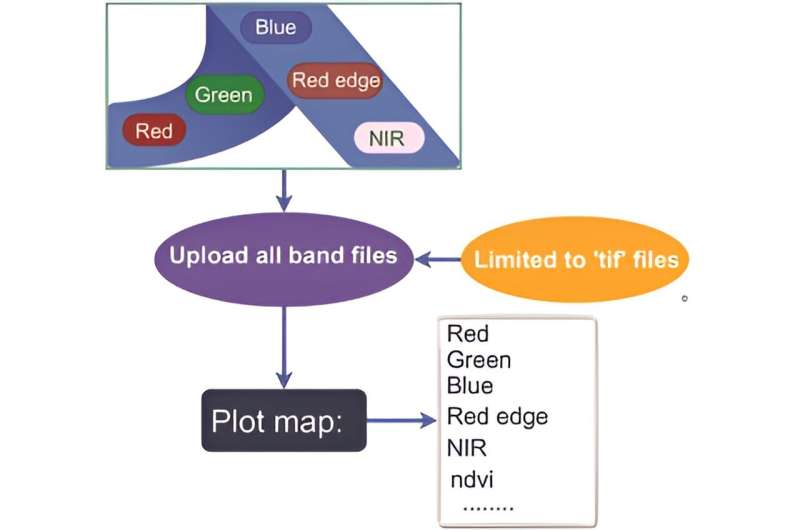
Due to their ability to collect tree phenotypic trait data in large quantities, unmanned aerial vehicles, or UAVs, have completely changed the forestry industry. Even with the progress made in object detection and remote sensing, precise identification and extraction of spectral data for individual trees continue to be major obstacles, frequently necessitating tedious manual annotation.
For better tree detection, current research focuses on developing segmentation algorithms and convolution
OpenLayers 9.0.0 Released
By Lurker,
The 9.0 release add several new features, including a Google Maps source (finally!), improved WebGL line rendering, and a new symbol and text decluttering implementation. We also improved and broadened flat styles support for both WebGL and Canvas 2D renderers. For better developer experience, we made more types generic and fixed some issues with types.
Backwards incompatible changes
Improved render order of decluttered items
Decluttered items in Vector and VectorTile layers now maintai
AGI and GGP to Work Together to Secure Geography at the Heart of Government Decision Making
By Lurker,
The Association for Geographic Information (AGI) and the Government Geography Profession (GGP) have agreed to work together to combine their experience, expertise and outreach to further the impact of geospatial data and technology within the public sector. By working together, they will help grow the geospatial community, and will build on recent activities such as the AGI’s Skills Roundtable.
“The UK is at the forefront of geospatial. Now more than ever, geographers are combining increasi
-
Forum Statistics
8.7k
Total Topics43.5k
Total Posts
-
Latest Posts
-
-

-
NASA and the Italian Space Agency made history on March 3 when the Lunar GNSS Receiver Experiment (LuGRE) became the first technology demonstration to acquire and track Earth-based navigation signals on the Moon’s surface. The LuGRE payload’s success in lunar orbit and on the surface indicates that signals from the GNSS (Global Navigation Satellite System) can be received and tracked at the Moon. These results mean NASA’s Artemis missions, or other exploration missions, could benefit from these signals to accurately and autonomously determine their position, velocity, and time. This represents a steppingstone to advanced navigation systems and services for the Moon and Mars. “On Earth we can use GNSS signals to navigate in everything from smartphones to airplanes,” said Kevin Coggins, deputy associate administrator for NASA’s SCaN (Space Communications and Navigation) Program. “Now, LuGRE shows us that we can successfully acquire and track GNSS signals at the Moon. This is a very exciting discovery for lunar navigation, and we hope to leverage this capability for future missions.” The road to the historic milestone began on March 2 when the Firefly Aerospace’s Blue Ghost lunar lander touched down on the Moon and delivered LuGRE, one of 10 NASA payloads intended to advance lunar science. Soon after landing, LuGRE payload operators at NASA’s Goddard Space Flight Center in Greenbelt, Maryland, began conducting their first science operation on the lunar surface. With the receiver data flowing in, anticipation mounted. Could a Moon-based mission acquire and track signals from two GNSS constellations, GPS and Galileo, and use those signals for navigation on the lunar surface? Then, at 2 a.m. EST on March 3, it was official: LuGRE acquired and tracked signals on the lunar surface for the first time ever and achieved a navigation fix — approximately 225,000 miles away from Earth. Now that Blue Ghost is on the Moon, the mission will operate for 14 days providing NASA and the Italian Space Agency the opportunity to collect data in a near-continuous mode, leading to additional GNSS milestones. In addition to this record-setting achievement, LuGRE is the first Italian Space Agency developed hardware on the Moon, a milestone for the organization. The LuGRE payload also broke GNSS records on its journey to the Moon. On Jan. 21, LuGRE surpassed the highest altitude GNSS signal acquisition ever recorded at 209,900 miles from Earth, a record formerly held by NASA’s Magnetospheric Multiscale Mission. Its altitude record continued to climb as LuGRE reached lunar orbit on Feb. 20 — 243,000 miles from Earth. This means that missions in cislunar space, the area of space between Earth and the Moon, could also rely on GNSS signals for navigation fixes. source: NASA
-
 Dear, could someone share again the link to download this soft please. best regards,
Dear, could someone share again the link to download this soft please. best regards,
-
-
Latest Topics
-
-
Recent Achievements
-


")