- 3 replies
- 2,094 views
- Add Reply
- 0 replies
- 1,264 views
- Add Reply
- 0 replies
- 1,178 views
- Add Reply
- 0 replies
- 1,627 views
- Add Reply
- 0 replies
- 897 views
- Add Reply
REVIEW: UAV IMAGE PROCESSING SOFTWARE

By Arhanghelul,
Here is an interesting review:
http://www.50northspatial.org/uav-image-processing-software-photogrammetry/
😉😊
Topcon showcases Products at Xponential 2019

By Lurker,
Topcon Positioning Group’s Dave Henderson offers a rundown on the company’s latest products, including the Falcon 8+ drone, Sirius Pro, MR-2 modular receiver, and B210 and B125 receiver boards, at Xponential 2019.
source:
https://www.gpsworld.com/topcon-showcases-falcon-8-drone-sirius-pro-and-receiver-boards-at-xponential-2019/
DT Research announced the DT301X-TR Rugged Tablet for Real time measurements
By Lurker,

DT Research, the leading designer and manufacturer of purpose-built computing solutions for vertical markets, today announced the DT301X-TR Rugged Tablet, a lightweight military-grade tablet that is purpose-built to enhance the precision for bridge and construction inspections, 3D surveying, mapping of underground utilities, and crime and crash scene reconstruction.
With 10.1” high-brightness capacitive touch screen that can easily be read in a wide range of lighting indoors and outdoors, a
New site from NASA, SpaceforUS, shows how its Earth data aids 50 states of America
By Lurker,
The state of Alaska is beautiful and wild — no wonder it is called the “Last Frontier”. The land has more than 130 volcanoes that pose a grave threat to the residents. A joint project by National Oceanic and Atmospheric Administration (NOAA) and NASA (National Aeronautics and Space Administration) has given scientists and forecasters a platform to protect people from volcanic ash.
This is one of the many case studies highlighted by the space agency on its new website, SpaceforUS, which inte
Tallysman release lightweight helical GNSS and iridium antennas
By Lurker,
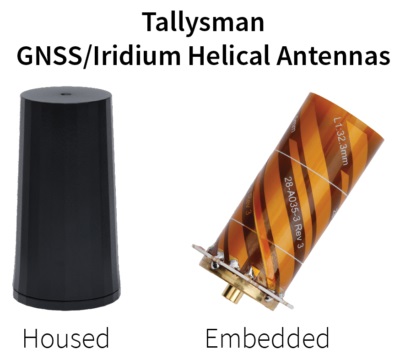
Tallysman, a leading manufacturer of high performance GNSS and Iridium antennas, is announcing the first three products of a new range of helical antennas to be introduced in 2019.
The first three models of the Tallysman helical family are:
HC871 (25g) – A housed, dual band, active GNSS antenna, supporting GPS L1/L2, GLONASS G1/G2, Galileo E1, and BeiDou B1.
HC872 (36g) – A housed, dual band, active GNSS antenna, supporting GPS L1/L2, GLONASS G1/G2, Galileo E1, BeiDou B1, and
-
Forum Statistics
8.8k
Total Topics43.5k
Total Posts
-
Latest Posts
-
-

-
 Are you ready to level up your geospatial skills? Join our comprehensive training course covering ArcMap, ArcGIS Pro, and ArcOnline—the essential tools for modern spatial analysis and programming! What You’ll Learn: Core functionalities of ArcMap & ArcGIS Pro Cloud-based mapping with ArcGIS Online Automating workflows with Python & ModelBuilder Creating interactive web maps & apps Who Should Enroll? GIS beginners & professionals Urban planners, environmental scientists, & data analysts Developers looking to integrate spatial programming Why Choose This Course? Hands-on projects & real-world applications Expert-led sessions & flexible learning Limited slots available! Click here to register. Let’s shape the future of spatial data together!
Are you ready to level up your geospatial skills? Join our comprehensive training course covering ArcMap, ArcGIS Pro, and ArcOnline—the essential tools for modern spatial analysis and programming! What You’ll Learn: Core functionalities of ArcMap & ArcGIS Pro Cloud-based mapping with ArcGIS Online Automating workflows with Python & ModelBuilder Creating interactive web maps & apps Who Should Enroll? GIS beginners & professionals Urban planners, environmental scientists, & data analysts Developers looking to integrate spatial programming Why Choose This Course? Hands-on projects & real-world applications Expert-led sessions & flexible learning Limited slots available! Click here to register. Let’s shape the future of spatial data together! -
GPS is an incredible piece of modern technology. Not only does it allow for locating objects precisely anywhere on the planet, but it also enables the turn-by-turn directions we take for granted these days — all without needing anything more than a radio receiver and some software to decode the signals constantly being sent down from space. [Chris] took that last bit bit as somewhat of a challenge and set off to write a software-defined GPS receiver from the ground up. As GPS started as a military technology, the level of precision needed for things like turn-by-turn navigation wasn’t always available to civilians. The “coarse” positioning is only capable of accuracy within a few hundred meters, so this legacy capability is the first thing that [Chris] tackles here. It is pretty fast, though, with the system able to resolve a location in 24 seconds from cold start and then displaying its information in a browser window. Everything in this build is done in Python as well, meaning that it’s a great starting point for investigating how GPS works and for building other projects from there. The other thing that makes this project accessible is that the only other hardware needed besides a computer that runs Python is an RTL-SDR dongle. These inexpensive TV dongles ushered in a software-defined radio revolution about a decade ago when it was found that they could receive a wide array of radio signals beyond just TV. source: Hackaday and GitHub - chrisdoble/gps-receiver
-
-
Latest Topics
-
-
Recent Achievements









