- 0 replies
- 712 views
- Add Reply
- 0 replies
- 442 views
- Add Reply
- 0 replies
- 932 views
- Add Reply
- 0 replies
- 699 views
- Add Reply
- 0 replies
- 1,257 views
- Add Reply
Earth Observing Satellites Online Compendium

By Lurker,
The Joint Agency Commercial Imagery Evaluation (JACIE) Earth Observing Satellites Online Compendium contains details about past, present and future Earth observing satellites and the sensors they carry.
Derived from print versions of Compendiums published in 2019, 2020, and 2022, this resource has been developed and is managed by the Requirements, Capabilities and Analysis for Earth Observation (RCA-EO) team at the USGS Earth Resources Observation and Science (EROS) Center in Sioux Falls,
GRIT remaps the world's rivers, branching into the unknown to aid global flood modeling
By Lurker,

The most comprehensive map of the world's rivers has been constructed by a group of academics at the University of Oxford. This map represents a significant step forward in terms of flood forecasting, climate risk planning, and water resource management in a world that is warming.
The new research, which was published in the journal Water Resources Research, features the introduction of GRIT, a mapping method that ultimately demonstrates how rivers actually flow, branch, and connect landsc
A breakthrough in high-speed, eye-safe LIDAR is made possible by heavy-metal-free quantum dots
By Lurker,
There are many different frequencies of light that reach Earth, some of which are visible to us and others of which are not. Because of its special characteristics, shortwave infrared (SWIR) stands out among these frequencies and is very helpful for Light Detection and Ranging (LIDAR) systems.
Like SONAR, which utilizes sound waves to determine distances, LIDAR employs laser pulses.
The danger of SWIR waves is that they do not reach the retina through the cornea and lens of the huma
Researchers develop holistic tool to help plan urban vacant lots
By Lurker,
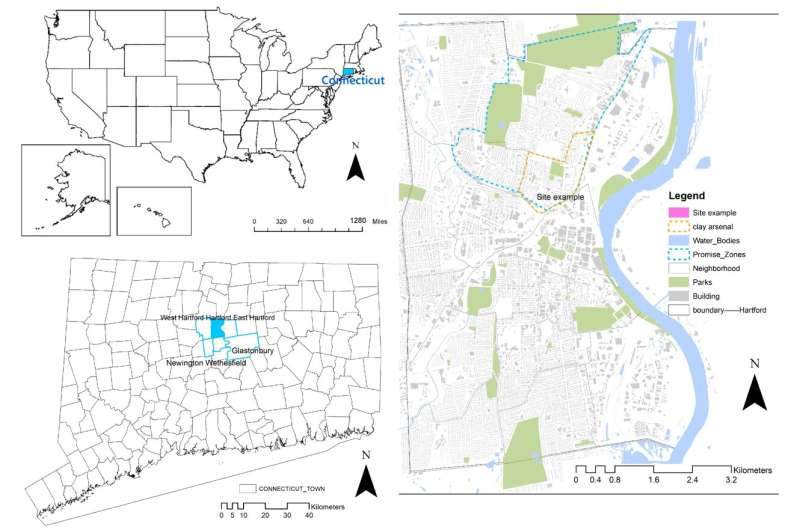
Vacant lots, though overlooked or seen as eyesores by many, represent opportunities.
UConn College of Agriculture, Health and Natural Resources doctoral researcher Pan Zhang and Assistant Professor Sohyun Park, both in the Department of Plant Science and Landscape Architecture, have created a framework to help cities and community members assess and prioritize which lots will have the biggest impact—for everyone—if they are repurposed. Their research is published in the journal Sustainabili
Multi-frequency microwave model advances land surface monitoring
By Lurker,

A new study introduces the Community Land Active Passive Microwave Radiative Transfer Modeling platform (CLAP)—a unified multi-frequency microwave scattering and emission model designed to revolutionize land surface monitoring. This cutting-edge platform combines active and passive microwave signals to offer potentially accurate simulations of soil moisture and vegetation conditions.
By incorporating advanced interaction models for soil and vegetation, CLAP has the potential to address key
-
Forum Statistics
8.8k
Total Topics43.5k
Total Posts
-
Latest Posts
-
-
The Joint Agency Commercial Imagery Evaluation (JACIE) Earth Observing Satellites Online Compendium contains details about past, present and future Earth observing satellites and the sensors they carry. Derived from print versions of Compendiums published in 2019, 2020, and 2022, this resource has been developed and is managed by the Requirements, Capabilities and Analysis for Earth Observation (RCA-EO) team at the USGS Earth Resources Observation and Science (EROS) Center in Sioux Falls, South Dakota. The Joint Agency Commercial Imagery Evaluation (JACIE) Earth Observing Satellites Online Compendium is derived from three print versions published in 2019, 2020, and 2022. This compendium provides detailed information on past, current and future land remote sensing satellites and their sensors. The data will be updated regularly as new satellites are launched into space. Visit this USGS webpage for more information on using the compendium. Comments, corrections, and further information on systems for inclusion in this compendium are welcomed and can be sent to [email protected]. The print and online compendia are developed by staff supporting the Requirements, Capabilities and Analysis for Earth Observation (RCA-EO) and the EROS Cal/Val Center of Excellence (ECCOE) projects at U.S. Geological Survey’s Earth Resources Observation and Science (EROS) Center and is done in conjunction with the multi-agency JACIE consortium. The content of the Compendium is updated weekly. The overall application was last updated February 2024. Please use this suggested citation when referencing the Compendium: Kropuenske, T., Clauson, J., Shaw, J., Vrabel, J., Ali, M., Ranjitkar, B., Rusten, T., and Anderson, C., 2024, Earth Observing Sensing Satellites Online Compendium: U.S. Geological Survey digital data, https://calval.cr.usgs.gov/apps/compendium. source: https://calval.cr.usgs.gov/apps/compendium
-
The most comprehensive map of the world's rivers has been constructed by a group of academics at the University of Oxford. This map represents a significant step forward in terms of flood forecasting, climate risk planning, and water resource management in a world that is warming. The new research, which was published in the journal Water Resources Research, features the introduction of GRIT, a mapping method that ultimately demonstrates how rivers actually flow, branch, and connect landscapes. Rivers are essential to existence, but they also present an increasing menace. It is anticipated that floods would become more frequent and severe in many regions of the world as a result of the increasing irregular nature of rainfall and the rising levels of the ocean. According to the assumption that rivers flow in a single direction and never split, the global river maps that are now in existence are both out of date and unnecessarily simplistic. They frequently fail to take into account intricate details, such as the scenario in which a single river channel divides into many channels. These branching river systems are significant due to the fact that they are frequently located in locations that are prone to flooding and have a high population density. Furthermore, they are essential for comprehending the movement of water across the surface of the Earth. A new worldwide river network known as worldwide River Topology (GRIT) has been developed by the team in order to solve this restriction of existing river maps that are used for water management and flood prediction. This network incorporates these branching rivers and massive canals, which captures the complexity of the situation. By merging high-resolution satellite imagery of rivers with enhanced elevation data of the Earth's surface, the Global River Information System (GRIT) was developed. Along with the main river courses, the GRIT also gives information on the sizes of rivers, the directions in which rivers flow, and the sites where rivers break. The overall length of the GRIT river network is 19.6 million kilometers, and it contains 67 thousand streams that split off from one another. In the fields of hydrology, ecology, geomorphology, and flood control, GRIT has the potential to greatly improve application capabilities. "We needed a global map that reflects the way rivers 'actually' behave," said Dr. Michel Wortmann, who developed GRIT at Oxford as a Research Associate on the EvoFLOOD project. "We needed a map that reflects the way all rivers behave." The assumption that rivers just flow in a downward direction in a straight line is not sufficient, particularly when we are attempting to forecast floods, comprehend ecosystems, or make preparations for the effects of climate change. This map depicts the entirety of the complexity that exists among the world's rivers. A significant advance in the forecast of floods and the protection against climate change Despite the fact that rivers are essential to ecosystems and human existence, they are becoming increasingly hazardous as a result of climate change, particularly when it comes to flooding. In order to get ready, it is necessary for governments and scientists to have an understanding of where water is likely to move on a big scale. Through the use of GRIT, a significantly more comprehensive perspective of water movement may be obtained, which contributes to the enhancement of flood models, water management systems, and disaster preparation. Additionally, the new river network provides assistance for the creation of artificial intelligence (AI) models that are global in scope and may be used to predict flooding, drought, water quality, habitat conservation, and natural hazards. Despite the fact that GRIT already represents a significant step forward, the Oxford team emphasizes that this is only the beginning. "GRIT has been built to evolve," professor of hydroclimatology at the University of Oxford Louise Slater said. "GRIT has been built to evolve." "Because it's fully automated, in contrast with previous global networks, we can keep updating it with the latest satellite images and topographic data, to understand shifts in the rivers and landscape." link: https://agupubs.onlinelibrary.wiley.com/doi/10.1029/2024WR038308 data: https://zenodo.org/records/7629908
-
By yousef2233 · Posted
The issue with handling file addresses has been fixed. 😑
-
-
Latest Topics
-
-
Recent Achievements
-


")






